-> Hier kostenlos registrieren
Programmierung der Kommunikation für den CAN-Bus.
Protokoll: CANOpen.
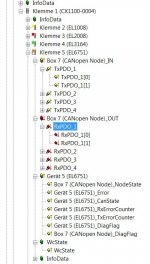
Hardware: Beckhoff CX1010 und CANopen Master Klemme EL6751.
Hallo Gemeinde,
muss mit den obigen HW-Komponenten über CANopen eine Verbindung zu einem Regler aufbauen.
Im TwinCATSysMng ist die HW konfiguriert und läuft auch einwandfrei. Nur SW-technisch habe ich leider überhaupt keine Ahnung,
wie die Kommunikation ausprogrammiert werden kann. soll heißen: keine Ahnung wie ich Messages empfangen und versenden kann?
Praktisch wären Programmbeispiele oder vorgefertigte FB's aus einer .lib.
Bitte helft mir!
Daberer
Protokoll: CANOpen.
Hardware: Beckhoff CX1010 und CANopen Master Klemme EL6751.
Hallo Gemeinde,
muss mit den obigen HW-Komponenten über CANopen eine Verbindung zu einem Regler aufbauen.
Im TwinCATSysMng ist die HW konfiguriert und läuft auch einwandfrei. Nur SW-technisch habe ich leider überhaupt keine Ahnung,
wie die Kommunikation ausprogrammiert werden kann. soll heißen: keine Ahnung wie ich Messages empfangen und versenden kann?
Praktisch wären Programmbeispiele oder vorgefertigte FB's aus einer .lib.
Bitte helft mir!
Daberer
Zuletzt bearbeitet: