-> Hier kostenlos registrieren
Hi,
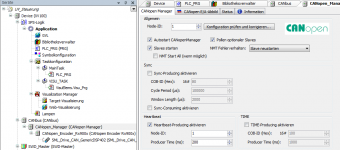
ich bin z.Z. daran einen Drehgeber in ein System einzubinden mit dem ich Weg und Geschwindigkeit analysieren will. Habe eine XV100 von Eaton und will einen Drehgeber von ifm (RM9000) programmieren. Die notwenidige eds Datei habe ich bereits implementiert.
Nun zu meinem Problem:
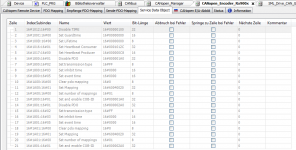
Wenn ich meine Applikation starte, wird mir mein Intrementalwert angezeigt. Theoretisch dürfte ich damit meinen Weg schon programmieren können. ABER: Dieser Wert wird nicht aktualisiert sobald ich am Drehgeber drehe. Der Wert ändert sich nur wenn ich stoppe und neu starte. Wie lässt sich dieses Problem ändern?
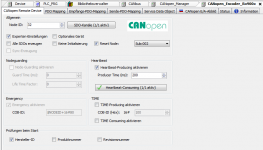
Desweiteren wird mir bei der SML_Drive_CAN_GenericDSP402 angezeigt, dass ein Konfigurationsfehler besteht. Ich finde allerdings nichts was falsch sein soll...
Wie kann ich damit eine Geschwindigkeit messen und ausgeben?
Gibt es einen fertigen FB für meine Problematik?
Mfg Messi ;-)
ich bin z.Z. daran einen Drehgeber in ein System einzubinden mit dem ich Weg und Geschwindigkeit analysieren will. Habe eine XV100 von Eaton und will einen Drehgeber von ifm (RM9000) programmieren. Die notwenidige eds Datei habe ich bereits implementiert.
Nun zu meinem Problem:
Wenn ich meine Applikation starte, wird mir mein Intrementalwert angezeigt. Theoretisch dürfte ich damit meinen Weg schon programmieren können. ABER: Dieser Wert wird nicht aktualisiert sobald ich am Drehgeber drehe. Der Wert ändert sich nur wenn ich stoppe und neu starte. Wie lässt sich dieses Problem ändern?
Desweiteren wird mir bei der SML_Drive_CAN_GenericDSP402 angezeigt, dass ein Konfigurationsfehler besteht. Ich finde allerdings nichts was falsch sein soll...
Wie kann ich damit eine Geschwindigkeit messen und ausgeben?
Gibt es einen fertigen FB für meine Problematik?
Mfg Messi ;-)


")