-> Hier kostenlos registrieren
Hallo,
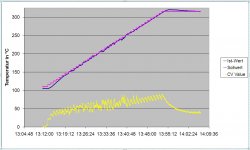
ich habe momentan bei einer Temperaturregelung das Problem, dass diese beim Hochheizen auf 315°C um 5°C überschwingt. Verwende dazu den PIDE Baustein aus RsLogix mit der integrierten Autotuning-Funktion.
Bekomme über einen PT100 den Ist-Wert und gebe den Sollwert über ein Thyristormodul aus, welches meine Heizung Pulsweise (PWM) ansteuert.
Kann man das Überschwingen mithilfe einer kaskadierten Regelung, also hintereinanderschalten von 2 PIDE-Bausteinen eventuell lösen oder macht das in diesem Fall wenig Sinn?
Hat jemand schon mit ZCDeadband und ZCOff gearbeitet und eine Verbesserung festgestellt?
Gruß
ich habe momentan bei einer Temperaturregelung das Problem, dass diese beim Hochheizen auf 315°C um 5°C überschwingt. Verwende dazu den PIDE Baustein aus RsLogix mit der integrierten Autotuning-Funktion.
Bekomme über einen PT100 den Ist-Wert und gebe den Sollwert über ein Thyristormodul aus, welches meine Heizung Pulsweise (PWM) ansteuert.
Kann man das Überschwingen mithilfe einer kaskadierten Regelung, also hintereinanderschalten von 2 PIDE-Bausteinen eventuell lösen oder macht das in diesem Fall wenig Sinn?
Hat jemand schon mit ZCDeadband und ZCOff gearbeitet und eine Verbesserung festgestellt?
Gruß