-> Hier kostenlos registrieren
Hallo,
ich habe vor einem viertel Jahr die SPS-Techniker Prüfung bestanden und soll nun meine erste Maschine programmieren. Da ich aber noch ein absoluter SPS-Anfänger bin brauche ich eure Hilfe bei der Lösung eines Positionier-problems.
SPS: CPU 315-2 DP
Umrichter: Movidrive A (soll über Profibus-DP angesteuert werden, Applikation "erweiterte Buspositionierung")
Software: Step 7 V5.3+SP2
Movitools Version 4.20
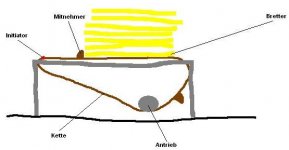
Bei dem Antrieb handelt es sich um einen Servo-Motor, der eine umlaufende Kette antreibt. Auf dieser Kette sind zwei Mitnehmer aufgebracht, die einzelne Bretter aus einem Brettermagazin herausbefördern. Diese Bretter werden dann in der Maschine vernagelt.
Der Arbeitablauf soll so aussehen:
Die Kette fördert ein Brett aus dem Brettmagazin heraus.
Wenn das Brett ausgeschoben ist kommt der Mitnehmer an einem Initiator vorbei, der als Referenzpunkt dienen soll. Wenn der Ini belegt wird soll die Kette noch einen voreingestellten Wert (über Op) weiterlaufen um wieder möglichst kurz hinter dem nächsten Brett zu halten. Dieser Wert muss je nach Brettlänge verändert werden.
Auf der Homepage von SEW gibt es ein Beispielprojekt zum Ansteuern eines Umrichters über Profibus-DP zum Download (erweiterte Buspositionierung). Mit diesem Programm lässt sich, dann ein Umrichter, der mit der Applikation "erweiterte Buspositionierung" inbetriebgenommen ist ansteuern. Das habe ich soweit auch alles verstanden.
Mein Problem sieht jetz wie folgt aus:
Zuerst muss ich den Antrieb ohne irgendeinen Positionsollwert mit maximaler Drehzahl das Brett ausfördern lassen. Wenn dann der Initiator belegt wird, soll der Referenzpunkt gesetzt werden und in den Umrichter ein Positionssollwert übertragen werden den der Antrieb dann anfährt und stoppt.
Wie muss ich dazu vorgehen ?
Ich hoffe ich habe mein Problem deutlich genug geschildert und hoffe, dass mir jemand helfen kann, der schonmal mit der erweiterten Buspositionierung von SEW gearbeitet hat.
ich habe vor einem viertel Jahr die SPS-Techniker Prüfung bestanden und soll nun meine erste Maschine programmieren. Da ich aber noch ein absoluter SPS-Anfänger bin brauche ich eure Hilfe bei der Lösung eines Positionier-problems.
SPS: CPU 315-2 DP
Umrichter: Movidrive A (soll über Profibus-DP angesteuert werden, Applikation "erweiterte Buspositionierung")
Software: Step 7 V5.3+SP2
Movitools Version 4.20
Bei dem Antrieb handelt es sich um einen Servo-Motor, der eine umlaufende Kette antreibt. Auf dieser Kette sind zwei Mitnehmer aufgebracht, die einzelne Bretter aus einem Brettermagazin herausbefördern. Diese Bretter werden dann in der Maschine vernagelt.
Der Arbeitablauf soll so aussehen:
Die Kette fördert ein Brett aus dem Brettmagazin heraus.
Wenn das Brett ausgeschoben ist kommt der Mitnehmer an einem Initiator vorbei, der als Referenzpunkt dienen soll. Wenn der Ini belegt wird soll die Kette noch einen voreingestellten Wert (über Op) weiterlaufen um wieder möglichst kurz hinter dem nächsten Brett zu halten. Dieser Wert muss je nach Brettlänge verändert werden.
Auf der Homepage von SEW gibt es ein Beispielprojekt zum Ansteuern eines Umrichters über Profibus-DP zum Download (erweiterte Buspositionierung). Mit diesem Programm lässt sich, dann ein Umrichter, der mit der Applikation "erweiterte Buspositionierung" inbetriebgenommen ist ansteuern. Das habe ich soweit auch alles verstanden.
Mein Problem sieht jetz wie folgt aus:
Zuerst muss ich den Antrieb ohne irgendeinen Positionsollwert mit maximaler Drehzahl das Brett ausfördern lassen. Wenn dann der Initiator belegt wird, soll der Referenzpunkt gesetzt werden und in den Umrichter ein Positionssollwert übertragen werden den der Antrieb dann anfährt und stoppt.
Wie muss ich dazu vorgehen ?
Ich hoffe ich habe mein Problem deutlich genug geschildert und hoffe, dass mir jemand helfen kann, der schonmal mit der erweiterten Buspositionierung von SEW gearbeitet hat.