zhanar 1486
Level-1
- Beiträge
- 5
- Reaktionspunkte
- 0
-> Hier kostenlos registrieren
Hallo an alle,
bin eine Studentin der Lebensmitteltechnologie in De, aber komme aus Kasachstan. Ich lerne jetzt Automatisierungstechnik.
Und ich habe eine dringende Hilfe für die Bearbeitung meiner Aufgabe zur Prüfung, die in zwei Wochen stattfindet.
Die Aufgabe lautet:
"Ein Beschleunigungssensor gibt die Beschleunigung in jeder der drei Koordinatenrichtungen als Gleichkommaanzahl an. Eine Steuerung berechne den Beitrag der Beschleunigung".
Ich soll hier mit Codesys eine Steuerung programmieren, die den Betrag eines Beschleunigungsvektors ändert, wenn eine oder mehrere der Vektorkoordinaten x,y,z gändert wird.
Ich habe also also den Vektor und soll daraus den Betrag des Vektors berechnen.
Da ich überhaupt nicht weiß, was ich hier machen soll, wäre eine komplette Lösung auch ohne Visualisierung toll und dringend nötig.
Möglichst auch einfach verständlich. : )
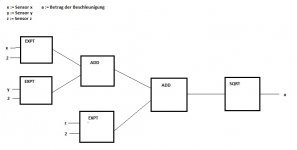
Wir haben bisher hauptsächlich mit der FUP Sprache gearbeitet. Ein Bekannter hat mir das geschickt, aber ich weiß nicht wie ich es bei CoDEsys umsetzen soll.
"...Die Aufgabe ist so gemeint:
Ein Beschleunigungssensor misst die Beschleunigung eines Objekts. Es
wird aber nicht ein einziger Wert für die Beschleunigung gemessen,
sondern aufgeteilt in die Richtungen x, y und z.
Jetzt sollst du mit der Funktionsbausteinsprache (FUP) ein Programm
schreiben, das aus den 3 Teilen einen Wert berechnet.
Du hast:
x (Beschleunigung in x-Richtung)
y (in y-Richtung)
z (in z-Richtung)
Diese 3 Gleitkommazahlen kommen von dem Sensor.
Wenn du jetzt den Betrag der Beschleunigung willst musst du rechnen:
|a| = sqrt( x² + y² + z² )
sqrt() ist die Wurzel."
Ich danke für eure Hilfe im Voraus!
Liebe Grüße Zhanar
bin eine Studentin der Lebensmitteltechnologie in De, aber komme aus Kasachstan. Ich lerne jetzt Automatisierungstechnik.
Und ich habe eine dringende Hilfe für die Bearbeitung meiner Aufgabe zur Prüfung, die in zwei Wochen stattfindet.
Die Aufgabe lautet:
"Ein Beschleunigungssensor gibt die Beschleunigung in jeder der drei Koordinatenrichtungen als Gleichkommaanzahl an. Eine Steuerung berechne den Beitrag der Beschleunigung".
Ich soll hier mit Codesys eine Steuerung programmieren, die den Betrag eines Beschleunigungsvektors ändert, wenn eine oder mehrere der Vektorkoordinaten x,y,z gändert wird.
Ich habe also also den Vektor und soll daraus den Betrag des Vektors berechnen.
Da ich überhaupt nicht weiß, was ich hier machen soll, wäre eine komplette Lösung auch ohne Visualisierung toll und dringend nötig.
Möglichst auch einfach verständlich. : )
Wir haben bisher hauptsächlich mit der FUP Sprache gearbeitet. Ein Bekannter hat mir das geschickt, aber ich weiß nicht wie ich es bei CoDEsys umsetzen soll.
"...Die Aufgabe ist so gemeint:
Ein Beschleunigungssensor misst die Beschleunigung eines Objekts. Es
wird aber nicht ein einziger Wert für die Beschleunigung gemessen,
sondern aufgeteilt in die Richtungen x, y und z.
Jetzt sollst du mit der Funktionsbausteinsprache (FUP) ein Programm
schreiben, das aus den 3 Teilen einen Wert berechnet.
Du hast:
x (Beschleunigung in x-Richtung)
y (in y-Richtung)
z (in z-Richtung)
Diese 3 Gleitkommazahlen kommen von dem Sensor.
Wenn du jetzt den Betrag der Beschleunigung willst musst du rechnen:
|a| = sqrt( x² + y² + z² )
sqrt() ist die Wurzel."
Ich danke für eure Hilfe im Voraus!
Liebe Grüße Zhanar