Manuel1995
Level-1
- Beiträge
- 32
- Reaktionspunkte
- 1
-> Hier kostenlos registrieren
Hey,
ich habe folgendes Problem. Ich habe einen Neigungssensor verbaut, welcher zwischen mehreren Werten springt.
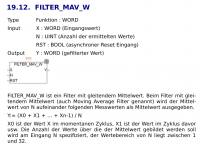
Um die Messung genauer zu machen wollte ich eine Dämpfung programmieren und bin dabei auf den Baustein FILTER_MAV_W in der Oscat lib gestoßen.
Beschreibung im Anhang. Ich habe diesen dann benutzt, oder wollte es jetzt springen die Werte noch mehr als zuvor.
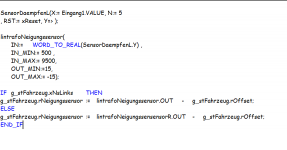
Kann mir jemand sagen was ich falsch gemacht habe? Dazu der weitere Anhang ein auszug des Codes.
Vielen Dank schonmal")
PS: bin auch gern offen für einen anderen Lösungsansatz
ich habe folgendes Problem. Ich habe einen Neigungssensor verbaut, welcher zwischen mehreren Werten springt.
Um die Messung genauer zu machen wollte ich eine Dämpfung programmieren und bin dabei auf den Baustein FILTER_MAV_W in der Oscat lib gestoßen.
Beschreibung im Anhang. Ich habe diesen dann benutzt, oder wollte es jetzt springen die Werte noch mehr als zuvor.
Kann mir jemand sagen was ich falsch gemacht habe? Dazu der weitere Anhang ein auszug des Codes.
Vielen Dank schonmal
PS: bin auch gern offen für einen anderen Lösungsansatz