-> Hier kostenlos registrieren
Hallo,
ich beschäftige mich zum 1. Mal mit der Konfiguration einer Beckhoff Steuerung und wollte mal hören, ob mir jemand mal "kurz " erklären kann, wie das Grundsätzlich von statten geht.
" erklären kann, wie das Grundsätzlich von statten geht.
Die Hardware:
-Panel PC CP6221 mit Visu vorinstalliert
- 3 x Koppler BK1120
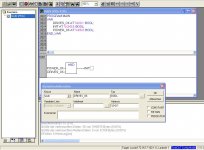
1. Welcher Teil von TwinCAT muss auf dem CP6221 installiert werden.
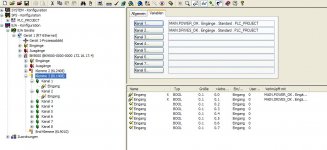
2. Wie sieht die Konfiguration der Hardware aus (Anbindung der Koppler mit Analog u. Digital I/O's an's CP6221).
Wäre super, wenn mir jemand da etwas Licht in die Sache bringen könnte.
Vielen Dank
Oli
ich beschäftige mich zum 1. Mal mit der Konfiguration einer Beckhoff Steuerung und wollte mal hören, ob mir jemand mal "kurz
" erklären kann, wie das Grundsätzlich von statten geht.Die Hardware:
-Panel PC CP6221 mit Visu vorinstalliert
- 3 x Koppler BK1120
1. Welcher Teil von TwinCAT muss auf dem CP6221 installiert werden.
2. Wie sieht die Konfiguration der Hardware aus (Anbindung der Koppler mit Analog u. Digital I/O's an's CP6221).
Wäre super, wenn mir jemand da etwas Licht in die Sache bringen könnte.
Vielen Dank
Oli