-> Hier kostenlos registrieren
Ich versuche seit Tagen einen Maxon-Motor mit der Maxon Steuerung EPOS 70/10 anzusprechen mit Beckhoff Kommunikationssystem.
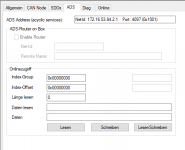
Die Kommunikation läuft über CANopen, weil die EPOS-Steuerung das unterstützt. Die EPOS-Steuerung wird an einer CANopen-Klemme EL6751 (von Beckhoff) angeschlossen. Von dieser Klemme geht es über EtherCAT-Klemme EK1100 (von Beckhoff) an PC.
So. Ich versuche über dieses System den Motor anzusteuern.
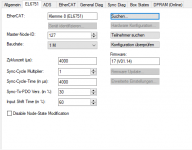
Das Problem ist: die Kommunikation ist unstabil, teilweise abgebrochen. Die EPOS-Steuerung meldet immer "CAN PDO length error".
Ich habe alles richtig eingestellt: Abschlusswiderstand, CAN-ID, Bitrate, Leitung usw... EDS-File von EPOS habe ich auch. Keine Komponente ist kaputt, ich habe jede einzelne getauscht (Motor, Steuerung, Beckhoff-Teil...). Ich kann es nicht erklären.
Kann mir jemand bitte helfen? Ich bin jetzt total verzweifelt.
Die Kommunikation läuft über CANopen, weil die EPOS-Steuerung das unterstützt. Die EPOS-Steuerung wird an einer CANopen-Klemme EL6751 (von Beckhoff) angeschlossen. Von dieser Klemme geht es über EtherCAT-Klemme EK1100 (von Beckhoff) an PC.
So. Ich versuche über dieses System den Motor anzusteuern.
Das Problem ist: die Kommunikation ist unstabil, teilweise abgebrochen. Die EPOS-Steuerung meldet immer "CAN PDO length error".
Ich habe alles richtig eingestellt: Abschlusswiderstand, CAN-ID, Bitrate, Leitung usw... EDS-File von EPOS habe ich auch. Keine Komponente ist kaputt, ich habe jede einzelne getauscht (Motor, Steuerung, Beckhoff-Teil...). Ich kann es nicht erklären.
Kann mir jemand bitte helfen? Ich bin jetzt total verzweifelt.










")