Hallo und nochmal Danke für die schnelle Antwort.
Ich habe jetzt herausgefunden das meine I2C Devices - ein MPU9150 und eine MD25 H-Brücke furchtbar langsam sind. Die Frage ist ob ich diese noch beschleunigen kann.
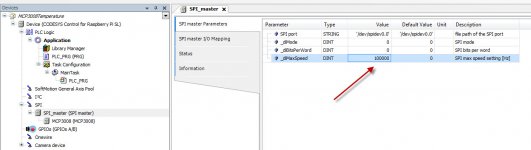
Orginal:
Wenn ich mir meinen Task so anschaue, läuft der richtig schnell. Bei einer Intervall Zeit von 12ms zeigt mir die Tasküberwachung Zykluszeiten von ca60µs an. Reduziere ich die Interval Zeit z.b. auf 10ms springt die Zykluszeit dann auf ca17000µs. Am aufgerufenen Programm selbst, scheint das nicht zu liegen, da ich bereits ein anderes, fast ohne Code getestet habe, auch hier zeigt sich selbiges Problem. In dem Programm lese ich einen I2C Gyroskop aus und steuere eine H-Brücke an. Beides I2C Geräte. Es gibt eine Visu, aber die läuft mit 100ms sehr langsam und wenn ich die wegnehme ändert sich das Verhalten nicht.