-> Hier kostenlos registrieren
Guten Morgen,
ich beschäftige mich seit einiger Zeit mit der neuen DIN 13849 und Sistema um unsere Maschinen mal durchzurechnen!
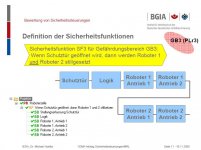
Als erstes möchte ich die Sicherheitsbezogene Stoppfunktion, eingeleitet durch eine Schutztür, ausrechenen...und hier habe ich gleich schonmal eine Frage....
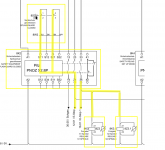
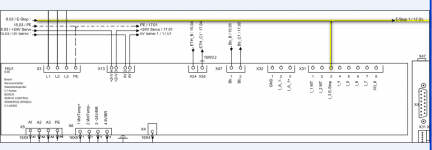
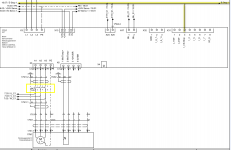
Wir haben ein Sicherheitsschalter (PILZ, PLe) was über zwei Kontakte auf ein Sicherheitsrelay (PILZ, PLe) geht. Schaltet dieses Relay durch, so werden in dem einen Kanal für alle unserer Regler (7 Stück von Bosch) GLEICHZEITIG eine Freigabe erteilt und in dem anderen Kanal zusätzlich zwei Schütze angesteuert, die für 2 Spindeln den Motor seperat abschalten.
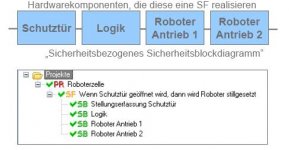
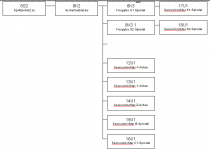
Die Frage ist eigentlich nur...werden die Regler so wie im angehängten Blockschaltbild untereinander zusammengefügt oder muss ich jeden Regler einzeln mit den Sicherheitsrelay und Schalter durchrechnen?
Benötigt wird ein PLr = C....ich erreiche jedoch nur B! Wenn ich jedoch nur einen Regler habe, dann hab ich C!
Ist ziemlich schlecht zu erklären aber ich hoffe ihr wisst was ich meine und könnt helfen
Gruß
Wignatz
ich beschäftige mich seit einiger Zeit mit der neuen DIN 13849 und Sistema um unsere Maschinen mal durchzurechnen!
Als erstes möchte ich die Sicherheitsbezogene Stoppfunktion, eingeleitet durch eine Schutztür, ausrechenen...und hier habe ich gleich schonmal eine Frage....
Wir haben ein Sicherheitsschalter (PILZ, PLe) was über zwei Kontakte auf ein Sicherheitsrelay (PILZ, PLe) geht. Schaltet dieses Relay durch, so werden in dem einen Kanal für alle unserer Regler (7 Stück von Bosch) GLEICHZEITIG eine Freigabe erteilt und in dem anderen Kanal zusätzlich zwei Schütze angesteuert, die für 2 Spindeln den Motor seperat abschalten.
Die Frage ist eigentlich nur...werden die Regler so wie im angehängten Blockschaltbild untereinander zusammengefügt oder muss ich jeden Regler einzeln mit den Sicherheitsrelay und Schalter durchrechnen?
Benötigt wird ein PLr = C....ich erreiche jedoch nur B! Wenn ich jedoch nur einen Regler habe, dann hab ich C!
Ist ziemlich schlecht zu erklären aber ich hoffe ihr wisst was ich meine und könnt helfen
Gruß
Wignatz


")