Guido.Make
Level-2
- Beiträge
- 6
- Reaktionspunkte
- 0
-> Hier kostenlos registrieren
Hallo zusammen,
ich bitte um Unterstützung bei der Inbetriebnahme eines Motors mit einem Beckhoff AX5000-Antrieb in TwinCAT. Ich schaffe es einfach nicht, den Motor zum Laufen zu bringen.
Setup:
Was habe ich bisher unternommen:
Schritt 1: Sicherstellen, dass sich der Motor richtig herum dreht
Der Abtrieb ist mit dem Harmonic Drive (HD) verbunden. Durch das Übersetzungsverhältnis von 100 ist ein Backdrive vom Abtrieb her nahezu unmöglich.
Frage: Gehe ich richtig in der Annahme, dass das HD die Drehrichtung umkehrt? Das heißt: Wenn sich der Servomotor im Uhrzeigersinn dreht, bewegt sich der Abtrieb gegen den Uhrzeigersinn?
Nächster Schritt: Bestimmung des elektrischen Kommutierungsoffsets
Ich habe versucht, gemäß Seite 168ff über den Parameter P-0-0166 vorzugehen:
Es werden Werte erzeugt, jedoch zeigt "Gleiche Richtung" immer "Nein" an. Das Vertauschen von U und V ändert zwar die Drehrichtung des Motors, beeinflusst das Ergebnis aber nicht. Ich erhalte keinen stabilen Wert. Hinweis: Gemäß Anleitung ist P-0-0150 (Commutation Node) ist aktuell auf 3 gesetzt; der mechanische Kommutierungsoffset steht auf 0°.
Ansatz 2 über das Manual: Kapitel 9.6: Kommutierungsmethoden (ab Seite 201)
Gemäß Anleitung wird zunächst P-0-0160 ausgeführt.
Unabhängig vom Wert in P-0-00578 (elektrischer Kommutierungsoffset) erhalte ich einen Wert für den mechanischen Offset, den ich anschließend in P-0-0150 eintrage.
Nach dieser Vorgehensweise und dem Vertauschen der UV-Polung erhalte ich bei erneutem Ausführen von P-0-0166 folgendes Ergebnis:
"Gleiche Richtung: Ja", Offset: 357,55°

Frage: Ist das Vorgehen korrekt?
Wenn ja, so sollte ich nach meinem Verständnis die Achse über NC-A: Online bewegen können (siehe Screenshot 3). Ich kann den Antrieb freischalten. Er gibt leichte Geräusche von sich, und man spürt Vibrationen an der Abtriebswelle.

Sobald ich jedoch einen Fahrbefehl über F2/F3 sende, steigt der Schleppfehler stark an und es erfolgt keine Bewegung (siehe Screenshot 4).

Die Parametrierung der Achse ist gemäß Screenshot 5 erfolgt.

Ich vermute, dass bei der Skalierung ein Fehler vorliegt und daher die Reglerparameter nicht richtig greifen. Ich finde jedoch keine fehlenden Einstellungen.
Weitere Punkte:
Ich bin für jeden Hinweis und jede Hilfe offen – es scheint alles so knapp vor dem Ziel zu sein.
Vielen Dank!
ich bitte um Unterstützung bei der Inbetriebnahme eines Motors mit einem Beckhoff AX5000-Antrieb in TwinCAT. Ich schaffe es einfach nicht, den Motor zum Laufen zu bringen.
Setup:
- Motor: Harmonic Drive LynxDrive‑20C‑100‑MEE‑AO (Übersetzung 100, MEE-Encoder (Heidenhain EQN-1125 Endat 2.2/2.1), Motordaten bekannt, Kommutierung unbekannt)
- Antrieb: Beckhoff AX5206‑0000‑0203, Firmware 1.0
Was habe ich bisher unternommen:
- EtherCAT-Bus in TwinCAT gescannt, Geräte wurden erkannt
- Der Antrieb wurde korrekt gefunden
- Power Management eingerichtet, Safety deaktiviert, Kanal 1 auf Positionsregelung eingestellt
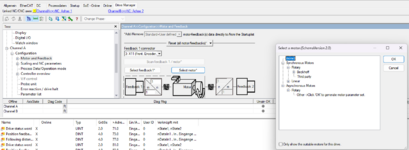
- Einrichtung Kanal 1: X11 als Encoderanschluss, Heidenhain EQN1125 aus der Liste ausgewählt, Motordaten manuell hinterlegt (PDF: harmonicdrive.de/...8856_08_2018_V04.pdf, Seite 17)
Beim Versuch, den Encoder zu scannen, wird er als EnDat 2.2 ohne Namensschild erkannt. Wenn ich jedoch einen EnDat 2.2-Encoder aus der Liste auswähle, funktioniert es nicht (Fehler: 0xF148: Build drive system: unknown feedback system).
Frage: Ich gehe davon aus, dass sich die Parameter auf den Motor und nicht auf die Abtriebswelle (hinter der HD-Reduktion) beziehen, korrekt?
- Skalierung eingerichtet
Frage: Hier bin ich mir unsicher. Für mich ergibt es Sinn, die Skalierung auf die Motorwelle zu beziehen, da der Encoder dort sitzt – also z. B. 360° pro Motorumdrehung – korrekt?

- Nächster Schritt: Einrichtung der Kommutierung (mechanischer und elektrischer Offset)
Hier komme ich nicht weiter. Das Handbuch (www.beckhoff.com/.../61857533) beschreibt zwei relevante Kapitel zur Kommutierung:
Schritt 1: Sicherstellen, dass sich der Motor richtig herum dreht
Der Abtrieb ist mit dem Harmonic Drive (HD) verbunden. Durch das Übersetzungsverhältnis von 100 ist ein Backdrive vom Abtrieb her nahezu unmöglich.
Frage: Gehe ich richtig in der Annahme, dass das HD die Drehrichtung umkehrt? Das heißt: Wenn sich der Servomotor im Uhrzeigersinn dreht, bewegt sich der Abtrieb gegen den Uhrzeigersinn?
Nächster Schritt: Bestimmung des elektrischen Kommutierungsoffsets
Ich habe versucht, gemäß Seite 168ff über den Parameter P-0-0166 vorzugehen:
Es werden Werte erzeugt, jedoch zeigt "Gleiche Richtung" immer "Nein" an. Das Vertauschen von U und V ändert zwar die Drehrichtung des Motors, beeinflusst das Ergebnis aber nicht. Ich erhalte keinen stabilen Wert. Hinweis: Gemäß Anleitung ist P-0-0150 (Commutation Node) ist aktuell auf 3 gesetzt; der mechanische Kommutierungsoffset steht auf 0°.
Ansatz 2 über das Manual: Kapitel 9.6: Kommutierungsmethoden (ab Seite 201)
Gemäß Anleitung wird zunächst P-0-0160 ausgeführt.
Unabhängig vom Wert in P-0-00578 (elektrischer Kommutierungsoffset) erhalte ich einen Wert für den mechanischen Offset, den ich anschließend in P-0-0150 eintrage.
Nach dieser Vorgehensweise und dem Vertauschen der UV-Polung erhalte ich bei erneutem Ausführen von P-0-0166 folgendes Ergebnis:
"Gleiche Richtung: Ja", Offset: 357,55°
Frage: Ist das Vorgehen korrekt?
Wenn ja, so sollte ich nach meinem Verständnis die Achse über NC-A: Online bewegen können (siehe Screenshot 3). Ich kann den Antrieb freischalten. Er gibt leichte Geräusche von sich, und man spürt Vibrationen an der Abtriebswelle.
Sobald ich jedoch einen Fahrbefehl über F2/F3 sende, steigt der Schleppfehler stark an und es erfolgt keine Bewegung (siehe Screenshot 4).
Die Parametrierung der Achse ist gemäß Screenshot 5 erfolgt.
Ich vermute, dass bei der Skalierung ein Fehler vorliegt und daher die Reglerparameter nicht richtig greifen. Ich finde jedoch keine fehlenden Einstellungen.
Weitere Punkte:
- Ich habe (nach bestem Wissen) die Polung und Belegung von Leistungs- und Encoderkabel überprüft – ich gehe davon aus, dass diese korrekt sind.
- Ich habe den Motor manuell mit einer niedrigen Gleichspannung beaufschlagt – er führt dann den erwarteten Sprung aus. Der Encoder liefert anschließend auch einen neuen Positionswert. ==> Ich vermute keinen Defekt des Motors.
Ich bin für jeden Hinweis und jede Hilfe offen – es scheint alles so knapp vor dem Ziel zu sein.
Vielen Dank!