-> Hier kostenlos registrieren
hallo,
ich komme mit einer analogwertnormierung nicht klar. ich rechne nun schon seit 3 std. rum, wie ich auf einen nenner komme.
ich habe einen servo (0-5V) analogeingang an eine analogbaugruppe angeschlossen. vorwärts oder rückwärts bekommt er von zwei bits.
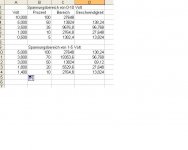
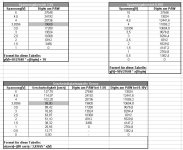
stelle ich nun den analogausgang in der hardwarekonfig auf 1-5V funktionierts. die geschwindigkeit die ich vorgebe, ist in cm/s. 100cm/s sind z.b. ein int wert von 19000. dieser wert kommt direkt auf das paw. logischerweise liefert mir der wert 9500 die hälfte geschwindigkeit, also 50cm/s
da aber auch selbst wenn paw 0 ist, auch 1 volt am servo ansteht, (der fährt ja einfach los, wenn man das bit für z. b. vorwärts auf eins setzt), dachte ich mir, ich verwendet den analogausgabewert 0-10 volt.
aber da treten jetzt die probleme erst auf. man kann ja anscheinend nicht sagen, wenn int wert 9800 =100cm/s sind, das automatisch intwert 4900 = 50cm/s sind. irgendwas mach ich da falsch. ich hab mir auch die ausgangsspannung angesehen, das kommt nicht hin.
kann mir von euch nen tipp geben, was ich falsch mache?
gruß
michael
ich komme mit einer analogwertnormierung nicht klar. ich rechne nun schon seit 3 std. rum, wie ich auf einen nenner komme.
ich habe einen servo (0-5V) analogeingang an eine analogbaugruppe angeschlossen. vorwärts oder rückwärts bekommt er von zwei bits.
stelle ich nun den analogausgang in der hardwarekonfig auf 1-5V funktionierts. die geschwindigkeit die ich vorgebe, ist in cm/s. 100cm/s sind z.b. ein int wert von 19000. dieser wert kommt direkt auf das paw. logischerweise liefert mir der wert 9500 die hälfte geschwindigkeit, also 50cm/s
da aber auch selbst wenn paw 0 ist, auch 1 volt am servo ansteht, (der fährt ja einfach los, wenn man das bit für z. b. vorwärts auf eins setzt), dachte ich mir, ich verwendet den analogausgabewert 0-10 volt.
aber da treten jetzt die probleme erst auf. man kann ja anscheinend nicht sagen, wenn int wert 9800 =100cm/s sind, das automatisch intwert 4900 = 50cm/s sind. irgendwas mach ich da falsch. ich hab mir auch die ausgangsspannung angesehen, das kommt nicht hin.
kann mir von euch nen tipp geben, was ich falsch mache?
gruß
michael