TobiTobsen
Level-1
- Beiträge
- 1
- Reaktionspunkte
- 0
-> Hier kostenlos registrieren
Hallo, ich habe ein rießiges Problem bei der Programmierung mit Zählern die ich für mein Projekt an der Schule benötige.
Auszug aus der Projektbeschreibung:
Ein von einer Rutsche kommendes Werkstück aktiviert den Roboter.
Dies geschieht mit Hilfe eines lichtempfindlichen Sensors.
Der Roboter fährt aus seiner Grundstellung, auf einer vorgegebenen Bahn, zum Werkstückstandort.
Jetzt zu meinem Problem, ich muss den Roboter dazu bringen dass er automatisch zu dem Werkstück fährt und dass muss ich über die Zähler machen.
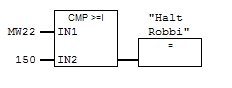
Ein Beispiel: Der Roboter fährt aus seiner Grundstellung (Zählwert 0) bis zu dem Werkstück ( Zählwert z.B. 150).
Wie bringe ich nun den Roboter (bzw. den Motor) dazu, dass er abschaltet wenn der Zählwert von 150 erreicht ist.
Hier noch ein Bild von der Anlage http://img92.imageshack.us/img92/1517/anlagete2.jpg
Screenschots von meinem Automatikbetrieb:
http://img247.imageshack.us/img247/6955/63024439kz6.png
http://img141.imageshack.us/img141/8353/60373512gu7.png
Ich würde mich freuen wenn mir jemand dabei weiterhelfen könnte.
MFG
TobiTobsen

Auszug aus der Projektbeschreibung:
Ein von einer Rutsche kommendes Werkstück aktiviert den Roboter.
Dies geschieht mit Hilfe eines lichtempfindlichen Sensors.
Der Roboter fährt aus seiner Grundstellung, auf einer vorgegebenen Bahn, zum Werkstückstandort.
Jetzt zu meinem Problem, ich muss den Roboter dazu bringen dass er automatisch zu dem Werkstück fährt und dass muss ich über die Zähler machen.
Ein Beispiel: Der Roboter fährt aus seiner Grundstellung (Zählwert 0) bis zu dem Werkstück ( Zählwert z.B. 150).
Wie bringe ich nun den Roboter (bzw. den Motor) dazu, dass er abschaltet wenn der Zählwert von 150 erreicht ist.
Hier noch ein Bild von der Anlage http://img92.imageshack.us/img92/1517/anlagete2.jpg
Screenschots von meinem Automatikbetrieb:
http://img247.imageshack.us/img247/6955/63024439kz6.png
http://img141.imageshack.us/img141/8353/60373512gu7.png
Ich würde mich freuen wenn mir jemand dabei weiterhelfen könnte.
MFG
TobiTobsen