
Waelder
Level-2
- Beiträge
- 964
- Reaktionspunkte
- 117
-> Hier kostenlos registrieren
Hallo Kollegen,
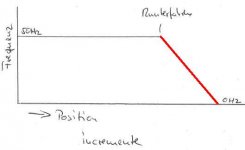
ich möchte einen FU (Bandantrieb) anhand von incrementen runterfahren, sprich eine position annähernd mit null anfahren.
Ursprünglich war dass so, dass der FU zwar irgendwann den befehl bekommt "Halten" er rampt selbst aus, aber überfährt oder unterfährt gelegentlich und muss von der Positionierung ev abrupt angehalten werden. Mein Gedanke ist nun ab einer bestimmten position mit hilfe von einer Rampe via inkrementalgeber dass ding runterzufahren.
Die position und die umrechnerei mit den incrementen bekomm ich schon auf die reihe aber die Rampe.....da langt mein hirnschmalz wohl grad nicht.
Hat da wer ein tipp ?
Hardware : 315CPU, ET200S 1 COUNT 24V/100 kHzC, MM420
Danke schon vom Wälder
Anhang meine gedachte Rampe
ich möchte einen FU (Bandantrieb) anhand von incrementen runterfahren, sprich eine position annähernd mit null anfahren.
Ursprünglich war dass so, dass der FU zwar irgendwann den befehl bekommt "Halten" er rampt selbst aus, aber überfährt oder unterfährt gelegentlich und muss von der Positionierung ev abrupt angehalten werden. Mein Gedanke ist nun ab einer bestimmten position mit hilfe von einer Rampe via inkrementalgeber dass ding runterzufahren.
Die position und die umrechnerei mit den incrementen bekomm ich schon auf die reihe aber die Rampe.....da langt mein hirnschmalz wohl grad nicht.
Hat da wer ein tipp ?
Hardware : 315CPU, ET200S 1 COUNT 24V/100 kHzC, MM420
Danke schon vom Wälder
Anhang meine gedachte Rampe


 Vielleicht ist es noch nicht so richtig aufgefallen ...
Vielleicht ist es noch nicht so richtig aufgefallen ...