-> Hier kostenlos registrieren
Hallo zusammen
Ich habe eine SPS (ET200 CU1512SP) und ein S120 Antrieb.
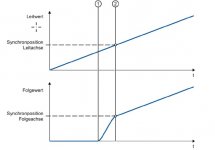
Nun möchte ich mit Technologieobjekten folgende Kurve fahren:

Bekannt sind alle Angaben:
A und C als Beschleunigung (Ruck konstant)
B nud D als Drehzahl
E und F als Anzahl Umdrehungen
Meine Idee war mit dem TO Move Absolut auf Position bei E zu fahren und "kurz vorher" mit Move Jog oder Move Velocity zu übernehmen.
Es ist nicht so schlimm, wenn man kurz vor Punkt E die Geschwindigkeit schon auf D reduziert hat, nach Punkt E sollte sie einfach stimmen. Die alle Parameter A bis E inkl. Ruck sind variabel und können vom Benutzer eigestellt werden.
Das Problem nun ist das "kurz vorher" schwer zu definieren ist. ich könnte rein theoretisch mit dem Ruck, der Beschleunigung und der bekannten Geschwindigkeitsdifferenz die Bremsstrecke berechnen. Finde ich aber nicht sehr schön gelöst, zumal je nach Distanz F die Maximalgeschwindigkeit B gar nicht erreicht wird. Gibt es da seitens Siemens eine vorbereitete Funktion, oder Möglichkeit dies "sauber" umzusetzten?
Ich habe leider bid jetzt noch nichts gefunden.
Danke unf Gruss
dx145
Ich habe eine SPS (ET200 CU1512SP) und ein S120 Antrieb.
Nun möchte ich mit Technologieobjekten folgende Kurve fahren:
Bekannt sind alle Angaben:
A und C als Beschleunigung (Ruck konstant)
B nud D als Drehzahl
E und F als Anzahl Umdrehungen
Meine Idee war mit dem TO Move Absolut auf Position bei E zu fahren und "kurz vorher" mit Move Jog oder Move Velocity zu übernehmen.
Es ist nicht so schlimm, wenn man kurz vor Punkt E die Geschwindigkeit schon auf D reduziert hat, nach Punkt E sollte sie einfach stimmen. Die alle Parameter A bis E inkl. Ruck sind variabel und können vom Benutzer eigestellt werden.
Das Problem nun ist das "kurz vorher" schwer zu definieren ist. ich könnte rein theoretisch mit dem Ruck, der Beschleunigung und der bekannten Geschwindigkeitsdifferenz die Bremsstrecke berechnen. Finde ich aber nicht sehr schön gelöst, zumal je nach Distanz F die Maximalgeschwindigkeit B gar nicht erreicht wird. Gibt es da seitens Siemens eine vorbereitete Funktion, oder Möglichkeit dies "sauber" umzusetzten?
Ich habe leider bid jetzt noch nichts gefunden.
Danke unf Gruss
dx145