
Zuviel Werbung?
-> Hier kostenlos registrieren
-> Hier kostenlos registrieren
Mahlzeit Community,
ich stehe vor einem für mich großem Problem welches ich im folgenden Erläutere.
Problem:
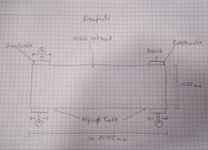
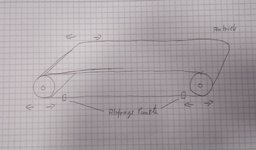
Ich muss für ein Projekt bei einem Metall Förderband die Lage abfragen und wenn nötig das Band Automatisch neu Ausrichten um es so gut wie möglich
in der "Mittelspur" zu halten.
Abgefragt wird das Band an zwei Punkten wovon der eine im Bereich der Antriebswalze ist der andere im Bereich der Umlenkwalze.
Das Abfragen ist kein Problem (Wird mittels abtastrollen mit Analogsignal 4-20mA durchgeführt).
Das Band hat drei Motoren die via Übersetzung die Walzen Ausrichten sollen (2 an der Umlenkwalze, 1 an der Antriebswalze) falls es aus der "Spur" läuft.
Und dort komme ich nicht weiter.
Bis jetzt habe ich kein zufrieden stellendes Ergebnis erzielt.
Habe zur zeit immer mit festen werten gearbeitet um das Band wieder in die Spur zu kommen, was aber immer gescheitert ist da sich das Band mal schneller mal
langsamer Aufgeschaukelt hat und dann nicht mehr zu "Bremsen" war/ist.
Falls jemand Erfahrung mit dieser Thematik und/oder Tipps hat wäre ich sehr dankbar.
Steuerung:
Wago PFC 750-8202
Programmiert wird in e!Cockpit
ich stehe vor einem für mich großem Problem welches ich im folgenden Erläutere.
Problem:
Ich muss für ein Projekt bei einem Metall Förderband die Lage abfragen und wenn nötig das Band Automatisch neu Ausrichten um es so gut wie möglich
in der "Mittelspur" zu halten.
Abgefragt wird das Band an zwei Punkten wovon der eine im Bereich der Antriebswalze ist der andere im Bereich der Umlenkwalze.
Das Abfragen ist kein Problem (Wird mittels abtastrollen mit Analogsignal 4-20mA durchgeführt).
Das Band hat drei Motoren die via Übersetzung die Walzen Ausrichten sollen (2 an der Umlenkwalze, 1 an der Antriebswalze) falls es aus der "Spur" läuft.
Und dort komme ich nicht weiter.
Bis jetzt habe ich kein zufrieden stellendes Ergebnis erzielt.
Habe zur zeit immer mit festen werten gearbeitet um das Band wieder in die Spur zu kommen, was aber immer gescheitert ist da sich das Band mal schneller mal
langsamer Aufgeschaukelt hat und dann nicht mehr zu "Bremsen" war/ist.
Falls jemand Erfahrung mit dieser Thematik und/oder Tipps hat wäre ich sehr dankbar.
Steuerung:
Wago PFC 750-8202
Programmiert wird in e!Cockpit
 .
.

 . Werde mich aber wieder damit beschäftigen und dann versuchen mit PI-Regler anstatt fest werten zu arbeiten.
. Werde mich aber wieder damit beschäftigen und dann versuchen mit PI-Regler anstatt fest werten zu arbeiten.

")

