-> Hier kostenlos registrieren
Guten Tag,
ich habe ein Problem mit der Dynamik meines S210 Umrichters in Verbindung mit dem Motor.
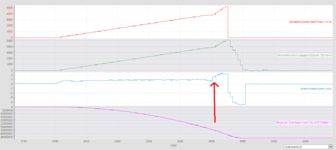
Im Trace ist ersichtlich, dass der Drehzahlsollwert ab ca. 3900 U/min einen plötzlichen Sprung nach oben macht. Bis zu diesem Punkt folgt der Drehzahlistwert dem Sollwert sehr präzise, doch nach dem Sprung steigt die Positionsabweichung stark an, wodurch der Umrichter in Störung geht.
Da die maximale Drehzahl des Motors bei 8000 U/min liegt, sollte dies eigentlich kein Problem darstellen.
Hat jemand bereits eine ähnliche Problematik beobachtet oder eine Idee, woran es liegen könnte?
System:
ich habe ein Problem mit der Dynamik meines S210 Umrichters in Verbindung mit dem Motor.
Im Trace ist ersichtlich, dass der Drehzahlsollwert ab ca. 3900 U/min einen plötzlichen Sprung nach oben macht. Bis zu diesem Punkt folgt der Drehzahlistwert dem Sollwert sehr präzise, doch nach dem Sprung steigt die Positionsabweichung stark an, wodurch der Umrichter in Störung geht.
Da die maximale Drehzahl des Motors bei 8000 U/min liegt, sollte dies eigentlich kein Problem darstellen.
Hat jemand bereits eine ähnliche Problematik beobachtet oder eine Idee, woran es liegen könnte?
System:
- Umrichter: 6SL3210-5HE10-4xFx
- Motor: 1FK2104-4AF0x-xSxx
- Steuerung: SIMATIC S7-1515F-2 PN
- Firmware: Alle Komponenten sind auf dem neuesten Stand





")