-> Hier kostenlos registrieren
Hallo Zusammen
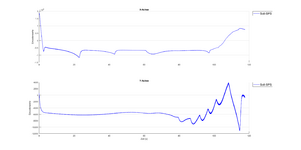
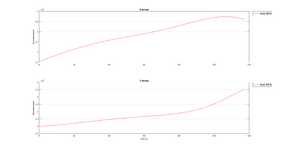
Ich bin gerade an meiner Bachelorarbeit und die Zeit drängt. Ich programmiere ein zwei-Achsensteuerung für eine Antenne. Die Bewegung klappt problemlos, jedoch ist die Genauigkeit noch nicht in dem Bereich, welcher angestrebt wird. Ich verwende eine Beckhoff SPS mit Motion Task (2ms), jedoch übermittele ich die Positionen nur alle 10ms. Die Interpolationszeit in den Antrieben ist korrekt auf 10ms eingestellt.
Für die Übermittlung verwende ich den MC-MoveAbsolute von Twincat . Meines erachtens habe ich alle Parameter korrekt eingestellt. Jedoch entspricht die Position demand value (interpolierte Position der antriebe, welche als Sollposition interpretiert wird), nicht der Sollkurve die ich vorgebe.
Hat jemand damit auch schon Probleme gehabt, oder stelle ich es nur falsch an? Ich wäre froh wenn mir jemand helfen könnte.
Gruss Fabrice
Ich bin gerade an meiner Bachelorarbeit und die Zeit drängt. Ich programmiere ein zwei-Achsensteuerung für eine Antenne. Die Bewegung klappt problemlos, jedoch ist die Genauigkeit noch nicht in dem Bereich, welcher angestrebt wird. Ich verwende eine Beckhoff SPS mit Motion Task (2ms), jedoch übermittele ich die Positionen nur alle 10ms. Die Interpolationszeit in den Antrieben ist korrekt auf 10ms eingestellt.
Für die Übermittlung verwende ich den MC-MoveAbsolute von Twincat . Meines erachtens habe ich alle Parameter korrekt eingestellt. Jedoch entspricht die Position demand value (interpolierte Position der antriebe, welche als Sollposition interpretiert wird), nicht der Sollkurve die ich vorgebe.
Hat jemand damit auch schon Probleme gehabt, oder stelle ich es nur falsch an? Ich wäre froh wenn mir jemand helfen könnte.
Gruss Fabrice