Zuviel Werbung?
-> Hier kostenlos registrieren
-> Hier kostenlos registrieren
Hallo zusammen,
in einem FB "Motor" soll das Dynamische Verhalten realisiert werden und zwar:
Die Dynamik der Rotationsmasse aus Anker und angeschloßener Last kann durch ein PT1-Verhalten mit T1=5s beschrieben werden. Eine zweite Verzögerung 1. Ordnung muss man wegen der elektrischen Eigenschaft aus Induktivität der Ankerwicklung und ihres ohmschen Widerstandes ansetzen. Diese Zeitkonstante wird hier mit T2=1s angenommen.
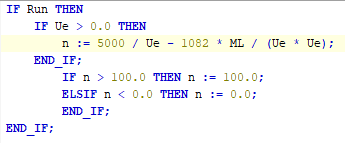
Die Dynamik des Motors habe ich so realisiert, dass ich 2 Instanzen des FB PT1 (PT1_1 für erste Verzögerung 1. Ordnung und PT1_2 für zweite Verzögerung) genommen habe und im Code des Motors im "stationäres" Verhalten eingefügt (sehe bitte Bilder anbei). Mit dem Signal "Run" wird die Dynamik ein- bzw. ausgeschaltet.
Wäre die Umsetzung so richtig ?
Vielen Dank im voraus
Viele Grüße
aem
[FONT="] [/FONT]
in einem FB "Motor" soll das Dynamische Verhalten realisiert werden und zwar:
Die Dynamik der Rotationsmasse aus Anker und angeschloßener Last kann durch ein PT1-Verhalten mit T1=5s beschrieben werden. Eine zweite Verzögerung 1. Ordnung muss man wegen der elektrischen Eigenschaft aus Induktivität der Ankerwicklung und ihres ohmschen Widerstandes ansetzen. Diese Zeitkonstante wird hier mit T2=1s angenommen.
Die Dynamik des Motors habe ich so realisiert, dass ich 2 Instanzen des FB PT1 (PT1_1 für erste Verzögerung 1. Ordnung und PT1_2 für zweite Verzögerung) genommen habe und im Code des Motors im "stationäres" Verhalten eingefügt (sehe bitte Bilder anbei). Mit dem Signal "Run" wird die Dynamik ein- bzw. ausgeschaltet.
Wäre die Umsetzung so richtig ?
Vielen Dank im voraus
Viele Grüße
aem
[FONT="] [/FONT]