-> Hier kostenlos registrieren
Hallo zusammen,
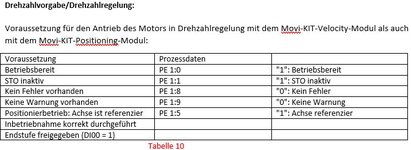
heute möchte ich mich über die erforderlichen Bitbelegung bei dem Steuerwort von Prozessdatenausgang1 und das Zustand -Wort von Prozessdateneingang 1 von Movikit velocity drive Schnittstelle zur Drehzahlregelung des Motors informieren.
es geht also um einen Movi Trac Advanced Umrichter und Software Modul (MoviKit velocity drive) von SEW ,das in Tia Portal als Schnittstelle eingetragen soll.
Wenn jemand eine Erfahrung in diesem Bereich hat,bitte ich dich um eine Rückmeldung.
Mit freundlichen Grüßen

heute möchte ich mich über die erforderlichen Bitbelegung bei dem Steuerwort von Prozessdatenausgang1 und das Zustand -Wort von Prozessdateneingang 1 von Movikit velocity drive Schnittstelle zur Drehzahlregelung des Motors informieren.
es geht also um einen Movi Trac Advanced Umrichter und Software Modul (MoviKit velocity drive) von SEW ,das in Tia Portal als Schnittstelle eingetragen soll.
Wenn jemand eine Erfahrung in diesem Bereich hat,bitte ich dich um eine Rückmeldung.
Mit freundlichen Grüßen