- Beiträge
- 9.277
- Reaktionspunkte
- 2.303
-> Hier kostenlos registrieren
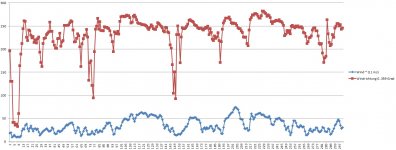
Über die Schwankungen wurde ich auch überlegen ob man ein "Qualität" von den Messung berechnen sollte.
Eine einzelne aussenliegende Wert (z.B. 10° - 11° - 12° - 11° - 10° - 11° - 12° - 11° - 90° - 11° - 12° wurde den Mittelwert nicht ekstrem beeinflussen.
Aber wenn den Messwert immer stark schwankt (z.B. 10° - 71° - 120° - 11° - 32° - 355° - 12° - 190° - 286° - 41° - 311°) dann stellt sich die Frage ob den "beruhigte" Wert überhaupt Sinn macht.
Ich wurde den Qualität so berechnen:
Summierte Abstand gebildet von die summierte X und Y Werte, dividiert durch die summierte Abstandswerte (ohne Vinkel).
Wenn diesen Wert nah zu 1.0 ist, dann ist die Qualität "gut".
Wenn diesen Wert nah zu 0.0 ist, dann ist die Qualität "schlecht".
Eine einzelne aussenliegende Wert (z.B. 10° - 11° - 12° - 11° - 10° - 11° - 12° - 11° - 90° - 11° - 12° wurde den Mittelwert nicht ekstrem beeinflussen.
Aber wenn den Messwert immer stark schwankt (z.B. 10° - 71° - 120° - 11° - 32° - 355° - 12° - 190° - 286° - 41° - 311°) dann stellt sich die Frage ob den "beruhigte" Wert überhaupt Sinn macht.
Ich wurde den Qualität so berechnen:
Summierte Abstand gebildet von die summierte X und Y Werte, dividiert durch die summierte Abstandswerte (ohne Vinkel).
Wenn diesen Wert nah zu 1.0 ist, dann ist die Qualität "gut".
Wenn diesen Wert nah zu 0.0 ist, dann ist die Qualität "schlecht".

")

 EDIT: auf der Webseite steht "m/s", in der pdf-Betriebsanleitung steht "ms"
EDIT: auf der Webseite steht "m/s", in der pdf-Betriebsanleitung steht "ms"