-> Hier kostenlos registrieren
Hallo!
Wir versuchen hier eine auf Schrittmotoren basierte Steuerung (Lang-Motoren) auf EtherCAT / Servomotoren umzubauen. Interessant daran: wir wollen (ich soll/muss/"darf") die alte Software-Steuerung beibehalten und "nur" die Hardware austauschen.
Gesagt, getan - inkl. Support von Beckhoff haben wir nun:
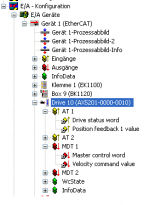
Unter dem Servo-Controller AX5201 hängt ein Motor und in der E/A Konfiguration habe ich nun unter AT1 und MDT1 die Ein-/Ausgänge.
Das habe ich mit einem eigenen I/O Task verknüpft und ich kann das ja mit TwinCAT mir alles anschauen - nur:
Wie muss ich das "Master control word" setzen, damit die Motoren fahren?
Außerdem: in einer anderen Konfig habe ich NC-Tasks installiert und mit dem den AX5201 verknüpft und mit Beckhoff Support konfiguriert.
Dieser NC-Task bietet eine recht komplexe ADS-Schnittstelle an. Die kann ich im I/O Task auch verknüpfen und die Statusausgaben beobachten, wenn ich eine NC-Testfahrt mache. Aber über den I/O Task den NC-Task über ADS ansteuern (fromPLC / toPLC) klappt auch nicht.
Guter Rat teuer - kennt jemand diese Probleme und weiß, wie er Motoren über ADS ansteuert bzw. wie die Bit-Belegung bei den Steuerworten aussieht?
Grüße,
ahds
Wir versuchen hier eine auf Schrittmotoren basierte Steuerung (Lang-Motoren) auf EtherCAT / Servomotoren umzubauen. Interessant daran: wir wollen (ich soll/muss/"darf") die alte Software-Steuerung beibehalten und "nur" die Hardware austauschen.
Gesagt, getan - inkl. Support von Beckhoff haben wir nun:
- Windows XP PC mit Intel-Ethernet-Karte
- TwinCAT I/O - installiert und EtherCAT-Adapter auf die Intel-Karte gesetzt
- AX5201 Servo-Controller am EtherCAT
- passende Motor(en) am Servo-Controller
Unter dem Servo-Controller AX5201 hängt ein Motor und in der E/A Konfiguration habe ich nun unter AT1 und MDT1 die Ein-/Ausgänge.
Das habe ich mit einem eigenen I/O Task verknüpft und ich kann das ja mit TwinCAT mir alles anschauen - nur:
Wie muss ich das "Master control word" setzen, damit die Motoren fahren?
Außerdem: in einer anderen Konfig habe ich NC-Tasks installiert und mit dem den AX5201 verknüpft und mit Beckhoff Support konfiguriert.
Dieser NC-Task bietet eine recht komplexe ADS-Schnittstelle an. Die kann ich im I/O Task auch verknüpfen und die Statusausgaben beobachten, wenn ich eine NC-Testfahrt mache. Aber über den I/O Task den NC-Task über ADS ansteuern (fromPLC / toPLC) klappt auch nicht.
Guter Rat teuer - kennt jemand diese Probleme und weiß, wie er Motoren über ADS ansteuert bzw. wie die Bit-Belegung bei den Steuerworten aussieht?
Grüße,
ahds