-> Hier kostenlos registrieren
Hallo Zusammen
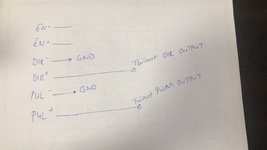
ich bin neue in Beckhoff Hardware. Ich benutze CX7080 Embedded PC von Beckhoff. Ich wollte eine Stepper Motor ansteuern. CX7080 hat PWM Output. Meine Frage ist muss ich in TwinCAT 3 in Motion Bereich eine AXIS bauen. Der Motor ist nicht von Beckhoff und ich besitze keine Steppermotor Klemmen von Beckhoff. Ich wollte nur PWM Output der CX7080 benutzen. Im Anhang habe ich den PWM Signal Mode Dokument angehängt. ich habe ein Programm für PWM geschrieben. Aber es läuft nicht wenn ich im real Hardware versuche. Wenn jemand weiß, wo ist die Problem in der Programm, bitte hier kurz schreiben.
IF GVL_Visu.MotorOff
AND GVL_I MotorOn THEN
MotorOn THEN
GVL_Visu.MotorOn := FALSE;
END_IF
IF GVL_Visu.MotorOn
AND GVL_IMotorOff THEN
GVL_Visu.MotorOff := FALSE;
END_IF
GVL_IMotorOn := GVL_Visu.MotorOn;
GVL_IMotorOff := GVL_Visu.MotorOff;
iMotorSpeedCalc := ((GVL_Visu.MotorSpeed - Input_min)*(Range_max - Range_min))/(Input_max-Input_min) + Input_min;
GVL_IMotorSpeed := iMotorSpeedCalc;
GVL_ISpeedPeriod := 10; // 10 kHz
vielen Dank
ich bin neue in Beckhoff Hardware. Ich benutze CX7080 Embedded PC von Beckhoff. Ich wollte eine Stepper Motor ansteuern. CX7080 hat PWM Output. Meine Frage ist muss ich in TwinCAT 3 in Motion Bereich eine AXIS bauen. Der Motor ist nicht von Beckhoff und ich besitze keine Steppermotor Klemmen von Beckhoff. Ich wollte nur PWM Output der CX7080 benutzen. Im Anhang habe ich den PWM Signal Mode Dokument angehängt. ich habe ein Programm für PWM geschrieben. Aber es läuft nicht wenn ich im real Hardware versuche. Wenn jemand weiß, wo ist die Problem in der Programm, bitte hier kurz schreiben.
IF GVL_Visu.MotorOff
AND GVL_I
MotorOn THENGVL_Visu.MotorOn := FALSE;
END_IF
IF GVL_Visu.MotorOn
AND GVL_I
MotorOff THENGVL_Visu.MotorOff := FALSE;
END_IF
GVL_I
MotorOn := GVL_Visu.MotorOn;GVL_I
MotorOff := GVL_Visu.MotorOff;iMotorSpeedCalc := ((GVL_Visu.MotorSpeed - Input_min)*(Range_max - Range_min))/(Input_max-Input_min) + Input_min;
GVL_I
MotorSpeed := iMotorSpeedCalc;GVL_I
SpeedPeriod := 10; // 10 kHzvielen Dank
 Ich kann in dem angehängten Dokument leider nicht die Stelle finden, wo steht, dass sich PWM zur Ansteuerung eines StepperMotors eignen soll.
Ich kann in dem angehängten Dokument leider nicht die Stelle finden, wo steht, dass sich PWM zur Ansteuerung eines StepperMotors eignen soll.
")