
-> Hier kostenlos registrieren
Hallo Zusammen,
Ich habe derzeit ein Problem, welches ich nicht gelöst bekomme:
Ich bin dabei eine Positionierachse mit dem Technologie Objekt und den Motion Control Anweisungen in Betrieb zu nehmen. Verwendet wird eine Zahnriemenachse der Firma Igus (ZLW-1660S-G0BW0-D0A2B-AM2A0AA-2000), ein Simatic Micro Drive Antriebsregler PDC 600 und ein Antriebsmotor der Firma ebm-papst mit einem integrierten iQ-Encoder und einem Planetengetriebe (ebm-papst 24 V Motor - ECI-63.40-B00-K1 - PerformaxPlus 63.2 (i=30,0:1) - SGE6340BK1PP63203060).
Die Achse funktioniert soweit, allerdings habe ich ein Problem mit dem Positionieren:
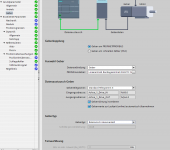
Wie auf meinem Bild zu sehen, ist auf den Schlitten der Zahnachse eine Applikation gebaut, die eine bestimmte Position anfahren soll. Diese weicht natürlich von der Position des Motors ab. Ich habe bisher gedacht ich könnte eine Art Korrekturfaktor ermitteln, wo ich bestimme wieviel Impulse für z.B. 100mm gebraucht werden, um so meine Position berechnen zu können. Leider funktioniert dies nur bedingt, da die Position vermutlich durch Rundungsfehler besonders auf einer längeren Distanz variiert bzw. Sollwert immer leicht überfahren wird. Das sollte bei dieser Applikation nicht passieren. Wie löst Ihr solche Probleme bzw. habt ihr Tipps um so etwas zu umgehen? Bin daran im Moment schon sehr verzweifelt.
Vielen Dank für eure Hilfe!
MfG
Ich habe derzeit ein Problem, welches ich nicht gelöst bekomme:
Ich bin dabei eine Positionierachse mit dem Technologie Objekt und den Motion Control Anweisungen in Betrieb zu nehmen. Verwendet wird eine Zahnriemenachse der Firma Igus (ZLW-1660S-G0BW0-D0A2B-AM2A0AA-2000), ein Simatic Micro Drive Antriebsregler PDC 600 und ein Antriebsmotor der Firma ebm-papst mit einem integrierten iQ-Encoder und einem Planetengetriebe (ebm-papst 24 V Motor - ECI-63.40-B00-K1 - PerformaxPlus 63.2 (i=30,0:1) - SGE6340BK1PP63203060).
Die Achse funktioniert soweit, allerdings habe ich ein Problem mit dem Positionieren:
Wie auf meinem Bild zu sehen, ist auf den Schlitten der Zahnachse eine Applikation gebaut, die eine bestimmte Position anfahren soll. Diese weicht natürlich von der Position des Motors ab. Ich habe bisher gedacht ich könnte eine Art Korrekturfaktor ermitteln, wo ich bestimme wieviel Impulse für z.B. 100mm gebraucht werden, um so meine Position berechnen zu können. Leider funktioniert dies nur bedingt, da die Position vermutlich durch Rundungsfehler besonders auf einer längeren Distanz variiert bzw. Sollwert immer leicht überfahren wird. Das sollte bei dieser Applikation nicht passieren. Wie löst Ihr solche Probleme bzw. habt ihr Tipps um so etwas zu umgehen? Bin daran im Moment schon sehr verzweifelt.
Vielen Dank für eure Hilfe!
MfG






")


")