-> Hier kostenlos registrieren
Hi allerseits,
ich habe eine Aufgabe wo mir vielleicht der korrekte Ansatz fehlt. Geben ist:
- Eine Sinusförmige Sollwertkurve im 10ms Raster
- ein Istwert verzögert um ca. 550-650 ms mit einer Aktualisierungsrate von 30-70 ms
- Eine S7-1500 und ein ABB DCS
Realisiert ist aktuell, dass die S7 alle 10ms einen Sollwert an den DCS schickt und der das direkt umsetzt (Rampe = 0 weil in SPS Realisiert).
Jetzt ist es so das die Last sich noch in der Beschleunigungsphase befindet, während die SW-Kurve schon in die Verzögerung umschlägt. -> Dadurch wird die Maximal-/Minimalgeschwindigkeit nicht erreicht.
Vor dem Upgrade auf S7/DCS war ein S5 etc. verbaut. Dort wurde der ServoController(der jetzt durch den DCS ersetzt wurde) Zuerst mit der gewollten Sollkurve gefüttert. Dann wurde die diese abgefahren und die Differenz zwischen Soll- und Istkurve auf die Sollkurve aufgeschlagen(addiert). Anschließend wurde die Optimierte Sollkurve abgefahren und wieder die Differenz addiert. Dies wurde bis zu 10x wiederholt.
(1) Beim Versuch das im neuen System zu automatisieren kamen "zacken" in die optimierte sollkurven was wieder spürbare Vibrationen hervorrief.
(2) ein Dauerhafter Prozentualer Offset(nochmals gedämpft über die aktuelle Position in der Sinus Bewegung) führte dazu das die Beschleunigung viel besserwurde, bei der Verzögerung ein "Bauch" entstand, weil die Masse nicht nur beschleunigt werden muss, sondern neben der neg. Beschleunigung auch noch gegen den "Vorwärtsdrang"[mir fällt das Fachwort nicht ein] der gerade eben noch beschleunigten Masse angekämpft werden muss.
(3) Ein PI-Regler zur Berechnung eines Offsets nahm zwar die zackenraus brachte jedoch keine Dauerhafte Optimierung.
### Was für Konzepte gibt es noch zu Automatischen Sollkurven Optimierung?###
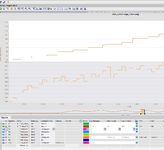
Anbei Aufzeichnung:
Orange: Optimierte Sollkurve
Rot: Gewollte Sollkurve
Braun: Istkurve
(Ich hoffe man sieht wie die Braune Kurve nach Rechts von der Roten abweicht?)
Danke.
ich habe eine Aufgabe wo mir vielleicht der korrekte Ansatz fehlt. Geben ist:
- Eine Sinusförmige Sollwertkurve im 10ms Raster
- ein Istwert verzögert um ca. 550-650 ms mit einer Aktualisierungsrate von 30-70 ms
- Eine S7-1500 und ein ABB DCS
Realisiert ist aktuell, dass die S7 alle 10ms einen Sollwert an den DCS schickt und der das direkt umsetzt (Rampe = 0 weil in SPS Realisiert).
Jetzt ist es so das die Last sich noch in der Beschleunigungsphase befindet, während die SW-Kurve schon in die Verzögerung umschlägt. -> Dadurch wird die Maximal-/Minimalgeschwindigkeit nicht erreicht.
Vor dem Upgrade auf S7/DCS war ein S5 etc. verbaut. Dort wurde der ServoController(der jetzt durch den DCS ersetzt wurde) Zuerst mit der gewollten Sollkurve gefüttert. Dann wurde die diese abgefahren und die Differenz zwischen Soll- und Istkurve auf die Sollkurve aufgeschlagen(addiert). Anschließend wurde die Optimierte Sollkurve abgefahren und wieder die Differenz addiert. Dies wurde bis zu 10x wiederholt.
(1) Beim Versuch das im neuen System zu automatisieren kamen "zacken" in die optimierte sollkurven was wieder spürbare Vibrationen hervorrief.
(2) ein Dauerhafter Prozentualer Offset(nochmals gedämpft über die aktuelle Position in der Sinus Bewegung) führte dazu das die Beschleunigung viel besserwurde, bei der Verzögerung ein "Bauch" entstand, weil die Masse nicht nur beschleunigt werden muss, sondern neben der neg. Beschleunigung auch noch gegen den "Vorwärtsdrang"[mir fällt das Fachwort nicht ein] der gerade eben noch beschleunigten Masse angekämpft werden muss.
(3) Ein PI-Regler zur Berechnung eines Offsets nahm zwar die zackenraus brachte jedoch keine Dauerhafte Optimierung.
### Was für Konzepte gibt es noch zu Automatischen Sollkurven Optimierung?###
Anbei Aufzeichnung:
Orange: Optimierte Sollkurve
Rot: Gewollte Sollkurve
Braun: Istkurve
(Ich hoffe man sieht wie die Braune Kurve nach Rechts von der Roten abweicht?)
Danke.



") .
.