Heinrich951
Level-2
- Beiträge
- 18
- Reaktionspunkte
- 0
-> Hier kostenlos registrieren
Hallo zusammen,
das ist hier mein erster Beitrag, wenn er nicht ganz rein passt bitte ich das zu entschuldigen. Zu meinem Problem:
Ich baue gerade im Rahmen meiner Bachelorarbeit eine ganz simple SPS von Beckhoff auf um mich mit der Programmierung und TwinCAT 3.1 (Build 4018.26) zu befassen. Später sollen auch noch Safety-Klemmen hinzukommen aber erst mal Schritt für Schritt.
Mit simpler SPS meine ich:
- Beckhoff CX5140 (TwinCAT 3.1 läuft auf diesem IPC)
- 1 x EL1809 16-Digitale Inputs
- 1 x EL 2809 16 Digitale-Outputs
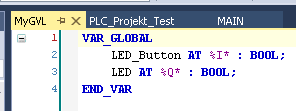
An die Input-Klemme habe ich lediglich an Channel 1 einen Taster (NC) und an die Output-Klemme Channel 1 eine LED geklemmt.
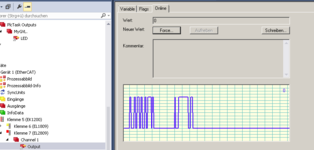
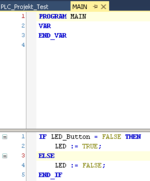
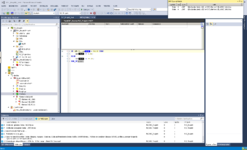
Zunächst habe ich den Bus gescannt und auch meine Klemmen gefunden. Durch erstellen des PLC-Projekt wird ja automatisch eine PLC-Task erzeugt die ich den Klemmen zugeordnet habe. Danach habe ich ein kleines Programm geschrieben, globale Variablen erzeugt und die entsprechenden In & Outputs zugewiesen. Jetzt kommt der problematische Teil: es funktioniert eigentlich alles, bis auf die Tatsächliche Ausgabe des Outputs. D.h. der Taster wird eingelesen, ändert in einer If-Anweisung auch den Status des Outputs und die verbundene Output-Variable im Prozessabbild wird gesetzt, ABER der Output schaltet die LED nicht an.
Ich bin jetzt schon seit 2 Tagen an der Fehlersuche dran und verzweifle langsam. Ich hab auch schon viele Seiten durchforstet, immer wieder was vielversprechendes gefunden was dann aber nicht funktioniert hat.
Nur mal ein kleiner Überblick über die Dinge die ich schon probiert habe.
- Verdrahtung geprüft & geändert
- unterschiedliche Ausgänge verwendet
- Klemmen getauscht
- SPS auf Hutschiene gesetzt.
- Projekt neu erstellt
- etc. (kann mich leider nicht an alles erinnern") )
)
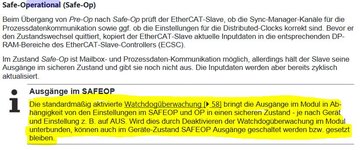
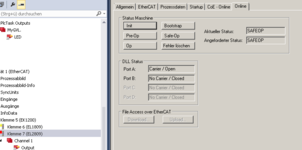
Ich habe jedoch eine Vermutung, laut Beckhoff wird bei dem Übergang von dem SAFEOP auf den OP-Modus vom EtherCAT-Slave überprüft ob die Sync-Manager-Kanäle und die Prozessdatenkommunikation fehlerfrei ist. Dabei kann er die Klemmen in einen sicheren Modus versetzen, sollte dies nicht der Fall sein, und damit die Ausgänge freischalten. Sowohl die Input als auch die Output-Klemme befinden sich in dem Modus SAFEOP und ich gehe davon aus das eventuell da mein Problem liegt. Ich weiß allerdings nicht wie ich das beheben kann.
Ein weiterer Ansatz wäre die frage ob die Hutschiene geerdet sein muss. Momentan liegt der ganze Aufbau auf meinem Schreibtisch in der Realität wäre diese ja an der geerdeten Montageplatte eines Schaltschrankes befestigt.
Ich hänge noch mal Bilder von den Ausschnitten aus TwinCAT an und auch die Beschreibung des SAFEOP-Modus.
Ich hoffe irg. jemand kann mir hier helfen.
Vielen Dank schon mal
VG
das ist hier mein erster Beitrag, wenn er nicht ganz rein passt bitte ich das zu entschuldigen. Zu meinem Problem:
Ich baue gerade im Rahmen meiner Bachelorarbeit eine ganz simple SPS von Beckhoff auf um mich mit der Programmierung und TwinCAT 3.1 (Build 4018.26) zu befassen. Später sollen auch noch Safety-Klemmen hinzukommen aber erst mal Schritt für Schritt.
Mit simpler SPS meine ich:
- Beckhoff CX5140 (TwinCAT 3.1 läuft auf diesem IPC)
- 1 x EL1809 16-Digitale Inputs
- 1 x EL 2809 16 Digitale-Outputs
An die Input-Klemme habe ich lediglich an Channel 1 einen Taster (NC) und an die Output-Klemme Channel 1 eine LED geklemmt.
Zunächst habe ich den Bus gescannt und auch meine Klemmen gefunden. Durch erstellen des PLC-Projekt wird ja automatisch eine PLC-Task erzeugt die ich den Klemmen zugeordnet habe. Danach habe ich ein kleines Programm geschrieben, globale Variablen erzeugt und die entsprechenden In & Outputs zugewiesen. Jetzt kommt der problematische Teil: es funktioniert eigentlich alles, bis auf die Tatsächliche Ausgabe des Outputs. D.h. der Taster wird eingelesen, ändert in einer If-Anweisung auch den Status des Outputs und die verbundene Output-Variable im Prozessabbild wird gesetzt, ABER der Output schaltet die LED nicht an.
Ich bin jetzt schon seit 2 Tagen an der Fehlersuche dran und verzweifle langsam. Ich hab auch schon viele Seiten durchforstet, immer wieder was vielversprechendes gefunden was dann aber nicht funktioniert hat.
Nur mal ein kleiner Überblick über die Dinge die ich schon probiert habe.
- Verdrahtung geprüft & geändert
- unterschiedliche Ausgänge verwendet
- Klemmen getauscht
- SPS auf Hutschiene gesetzt.
- Projekt neu erstellt
- etc. (kann mich leider nicht an alles erinnern
)Ich habe jedoch eine Vermutung, laut Beckhoff wird bei dem Übergang von dem SAFEOP auf den OP-Modus vom EtherCAT-Slave überprüft ob die Sync-Manager-Kanäle und die Prozessdatenkommunikation fehlerfrei ist. Dabei kann er die Klemmen in einen sicheren Modus versetzen, sollte dies nicht der Fall sein, und damit die Ausgänge freischalten. Sowohl die Input als auch die Output-Klemme befinden sich in dem Modus SAFEOP und ich gehe davon aus das eventuell da mein Problem liegt. Ich weiß allerdings nicht wie ich das beheben kann.
Ein weiterer Ansatz wäre die frage ob die Hutschiene geerdet sein muss. Momentan liegt der ganze Aufbau auf meinem Schreibtisch in der Realität wäre diese ja an der geerdeten Montageplatte eines Schaltschrankes befestigt.
Ich hänge noch mal Bilder von den Ausschnitten aus TwinCAT an und auch die Beschreibung des SAFEOP-Modus.
Ich hoffe irg. jemand kann mir hier helfen.
Vielen Dank schon mal
VG