Zuviel Werbung?
-> Hier kostenlos registrieren
-> Hier kostenlos registrieren
Hallo,
ich bin dabei eine Applikation mit folgenden Hardwareaufbau zu erstellen.
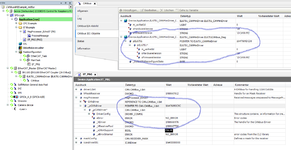
Raspberry mit Codesys 3.5, Ethercat mit EL6751, CANbus Stromsensor von Isabellenhütte
Ich habe mir dazu das Beispielprojekt "CANBus Example" von Codesys angesehen.
Ich kann leider die Verknüpfung von Software mit Hardware nicht erkennen.
bzw.
Wie kommt die Software an die Daten des "CANMiniDrivers" .... der EL6751.
Hat da jemand Erfahrung oder eine Idee.
Vielen Dank
ich bin dabei eine Applikation mit folgenden Hardwareaufbau zu erstellen.
Raspberry mit Codesys 3.5, Ethercat mit EL6751, CANbus Stromsensor von Isabellenhütte
Ich habe mir dazu das Beispielprojekt "CANBus Example" von Codesys angesehen.
Ich kann leider die Verknüpfung von Software mit Hardware nicht erkennen.
bzw.
Wie kommt die Software an die Daten des "CANMiniDrivers" .... der EL6751.
Hat da jemand Erfahrung oder eine Idee.
Vielen Dank