-> Hier kostenlos registrieren
Guten Morgen an alle, ")
ich beschäftige mich nun schon etwas länger mit der Drehmomentregelung an meiner Anlage und bin leider auf ein Problem gestoßen.
Meine Komponenten, welche mir zur Verfügung gestellt wurden sind folgende:
Mein Ergebnis war folgendes.
Nun zu meinen Fragen
ich beschäftige mich nun schon etwas länger mit der Drehmomentregelung an meiner Anlage und bin leider auf ein Problem gestoßen.
Meine Komponenten, welche mir zur Verfügung gestellt wurden sind folgende:
- AM8112-1F10-0000 mit der passenden Beckhoff Motorleitung
- EL7211-9014 mit einem Lüftermodul ZB8610
Mein Ergebnis war folgendes.
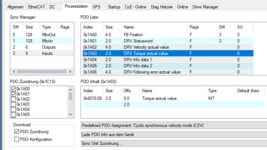
- In der Betriebsart CSV (Geschwindigkeitsregelung) konnte ich die Geschwindigkeit und die Position frei wählen und es hat funktioniert.
- In der Betriebsart CST (Drehmomentregelung) konnte ich die Geschwindigkeit und Position nicht festlegen. Der Motor ist mit maximaler Geschwindigkeit gegen das Bauteil gefahren und ist stehen geblieben.
Nun zu meinen Fragen
- Kann man zwischen der Geschwindigkeitsregelung und der Drehmomentregelung umschalten?
- Kann man bei der Drehmomentregelung auch eine Geschwindigkeit und Position angeben?