
-> Hier kostenlos registrieren
Hallo Zusammen,
ich hätte mal eine Frage zum E-/Mapping mit Pointern oder ähnlich.
Da ich jetzt nach 25 Jahren Siemens auf meine alten Tage noch in Beckhoff TWINCAT3 einsteigen soll und in meiner Fa. leider kein CODESYS Know How vorhanden ist wollte ich mal hier nachfragen wie man sowas denn so löst in TWINCAT damit ich nach Möglichkeit gleich den richtigen Weg einschlage.
Bisher haben wir in Siemens die E-/A' komplett blockweise über pointer oder seit TIA teilweise auch über Systemkonstanten eingelesen und intern dann auf Strukturen gelegt.
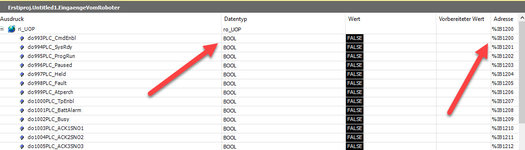
Nun habe ich versucht das ganze mit einer GVL zu lösen die über den AT Befehl eine Struktur im E-/A Bereich adressiert ( ri_UOP AT %IB1200 : ro_UOP") . Allerdings ist Online dann egal welcher Datentyp in der Struktur verwendet wird immer ein Byte verwendet. Bei der Peripherie die ich einlesen wollte handelt es sich um einen Roboter der ein E-/A Feld von 128E und 128A hat dieses Feld haben wir unterteilt in die ersten 20 Byte mit Standard Signalen und den Rest in optionale Signale.
. Allerdings ist Online dann egal welcher Datentyp in der Struktur verwendet wird immer ein Byte verwendet. Bei der Peripherie die ich einlesen wollte handelt es sich um einen Roboter der ein E-/A Feld von 128E und 128A hat dieses Feld haben wir unterteilt in die ersten 20 Byte mit Standard Signalen und den Rest in optionale Signale.
Leider habe ich aktuell noch keine Hardware.
Die Screenshots zeigen die Siemens Konfiguration und was ich in TWINCAT versucht habe.
Könnt Ihr mir bitte ein paar Tipps geben wie man das lösen könnte ?
Danke
ich hätte mal eine Frage zum E-/Mapping mit Pointern oder ähnlich.
Da ich jetzt nach 25 Jahren Siemens auf meine alten Tage noch in Beckhoff TWINCAT3 einsteigen soll und in meiner Fa. leider kein CODESYS Know How vorhanden ist wollte ich mal hier nachfragen wie man sowas denn so löst in TWINCAT damit ich nach Möglichkeit gleich den richtigen Weg einschlage.
Bisher haben wir in Siemens die E-/A' komplett blockweise über pointer oder seit TIA teilweise auch über Systemkonstanten eingelesen und intern dann auf Strukturen gelegt.
Nun habe ich versucht das ganze mit einer GVL zu lösen die über den AT Befehl eine Struktur im E-/A Bereich adressiert ( ri_UOP AT %IB1200 : ro_UOP
. Allerdings ist Online dann egal welcher Datentyp in der Struktur verwendet wird immer ein Byte verwendet. Bei der Peripherie die ich einlesen wollte handelt es sich um einen Roboter der ein E-/A Feld von 128E und 128A hat dieses Feld haben wir unterteilt in die ersten 20 Byte mit Standard Signalen und den Rest in optionale Signale.Leider habe ich aktuell noch keine Hardware.
Die Screenshots zeigen die Siemens Konfiguration und was ich in TWINCAT versucht habe.
Könnt Ihr mir bitte ein paar Tipps geben wie man das lösen könnte ?
Danke




")