
-> Hier kostenlos registrieren
Guten Morgen zusammen,
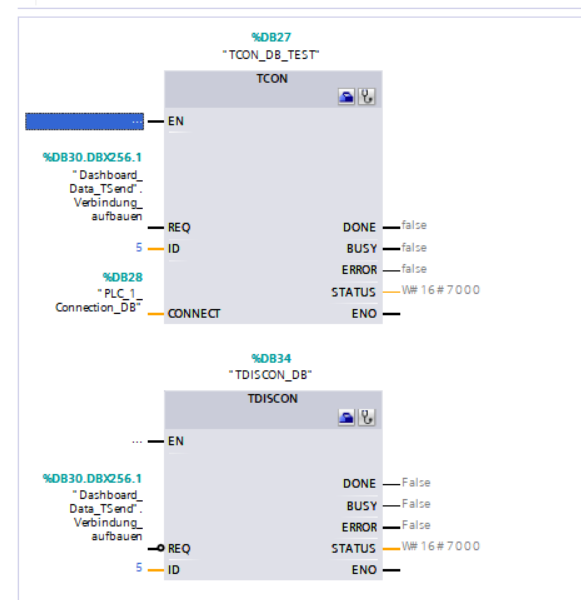
wir haben hier einen Roboter von Universal Robots, der mit einer S7 1212 kommunizieren soll.
Die Kommunikation ist eine OUC -Verbindung. Ich kann von der SPS aus Signale (via String) an den Roboter senden.
Dort kommen die Signale auch korrekt an und der Roboter macht das, was er machen soll.
Jedoch klappt das mit dem Auslesen der Antwort vom Roboter nicht so ganz.
Dazu verwende ich in der SPS einen TRCV Baustein.
Wenn ich jetzt einen String an den Roboter sende, sieht die Antwort, die ich bekomme wie folgt aus:

Weiß jemand wie man diese Antwort "lesbar" machen kann?
Hat schonmal jemand von euch versucht eine Siemens SPS mit einem Universal Robot via Dashboard Server kommunizieren zu lassen?
Habe das ganze auch im Forum von Universal Robots angefragt. Nachfolgend der Link dazu:
 forum.universal-robots.com
forum.universal-robots.com
Schon Mal vielen Dank für eure Hilfe/ Vorschläge.
Grüße aus Luxembourg!
wir haben hier einen Roboter von Universal Robots, der mit einer S7 1212 kommunizieren soll.
Die Kommunikation ist eine OUC -Verbindung. Ich kann von der SPS aus Signale (via String) an den Roboter senden.
Dort kommen die Signale auch korrekt an und der Roboter macht das, was er machen soll.
Jedoch klappt das mit dem Auslesen der Antwort vom Roboter nicht so ganz.
Dazu verwende ich in der SPS einen TRCV Baustein.
Wenn ich jetzt einen String an den Roboter sende, sieht die Antwort, die ich bekomme wie folgt aus:
Weiß jemand wie man diese Antwort "lesbar" machen kann?
Hat schonmal jemand von euch versucht eine Siemens SPS mit einem Universal Robot via Dashboard Server kommunizieren zu lassen?
Habe das ganze auch im Forum von Universal Robots angefragt. Nachfolgend der Link dazu:
Communication UR10e with Siemens PLC (TIA) via Dasboard Server
Good morning together, I´m struggling to get a running communication between my UR10e and my Siemens PLC (CPU 1212 TIA15.1) via Dashboard Server. To do the data exchange I use a OUC Communication which is established via TCON (and deactivated via TDISCON): For sending and receiving data i...
forum.universal-robots.com
Schon Mal vielen Dank für eure Hilfe/ Vorschläge.
Grüße aus Luxembourg!

")





















